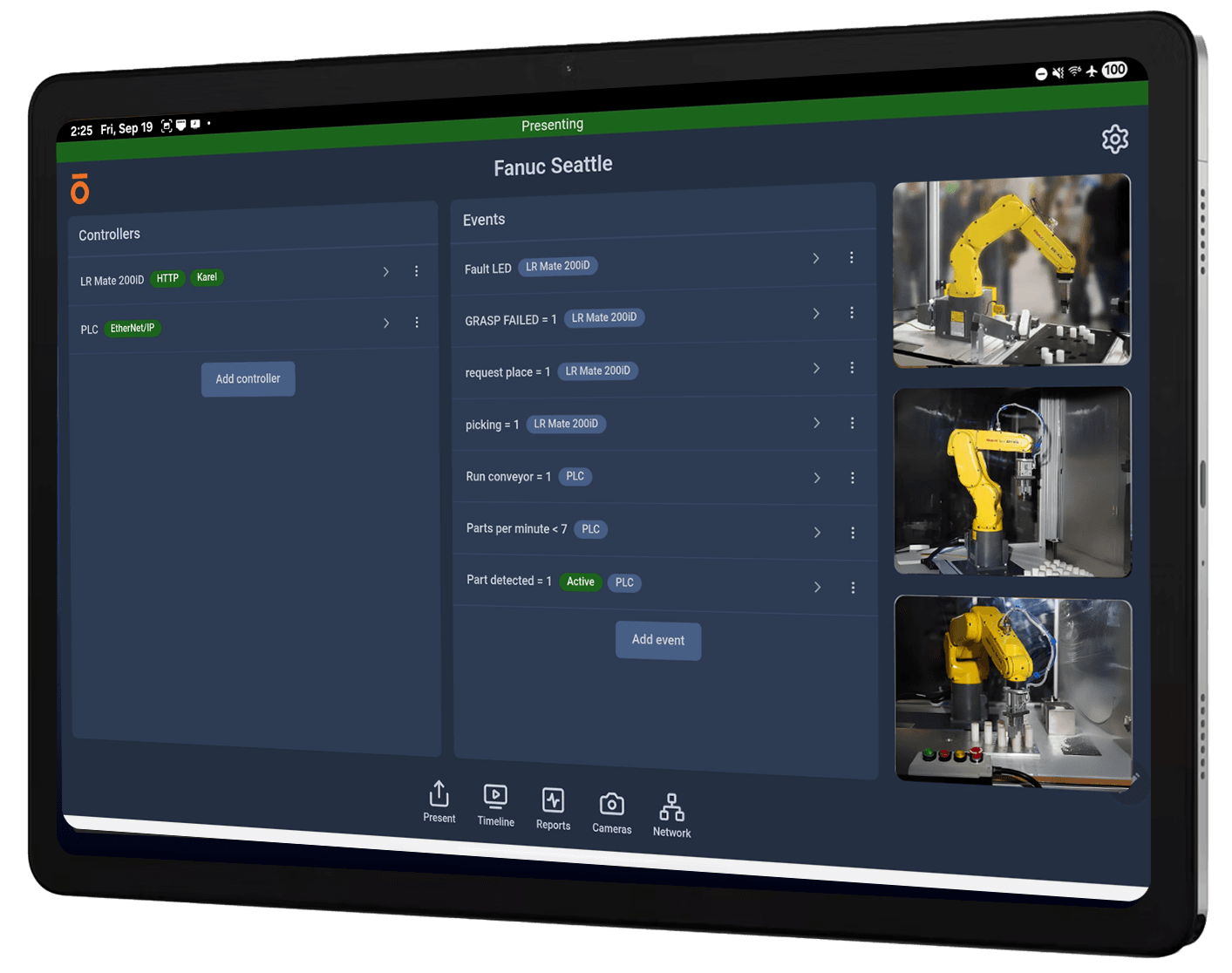
Synchronized Event Timeline
No more playing detective to pull together diagnostic data! Olis aligns weeks of video, event conditions, and historical state - all in one place
Download the app on our suggested android tablets
Use our USB-C to Ethernet adapter to connect to your controller
Monitor, diagnose, and troubleshoot your automation systems in real-time
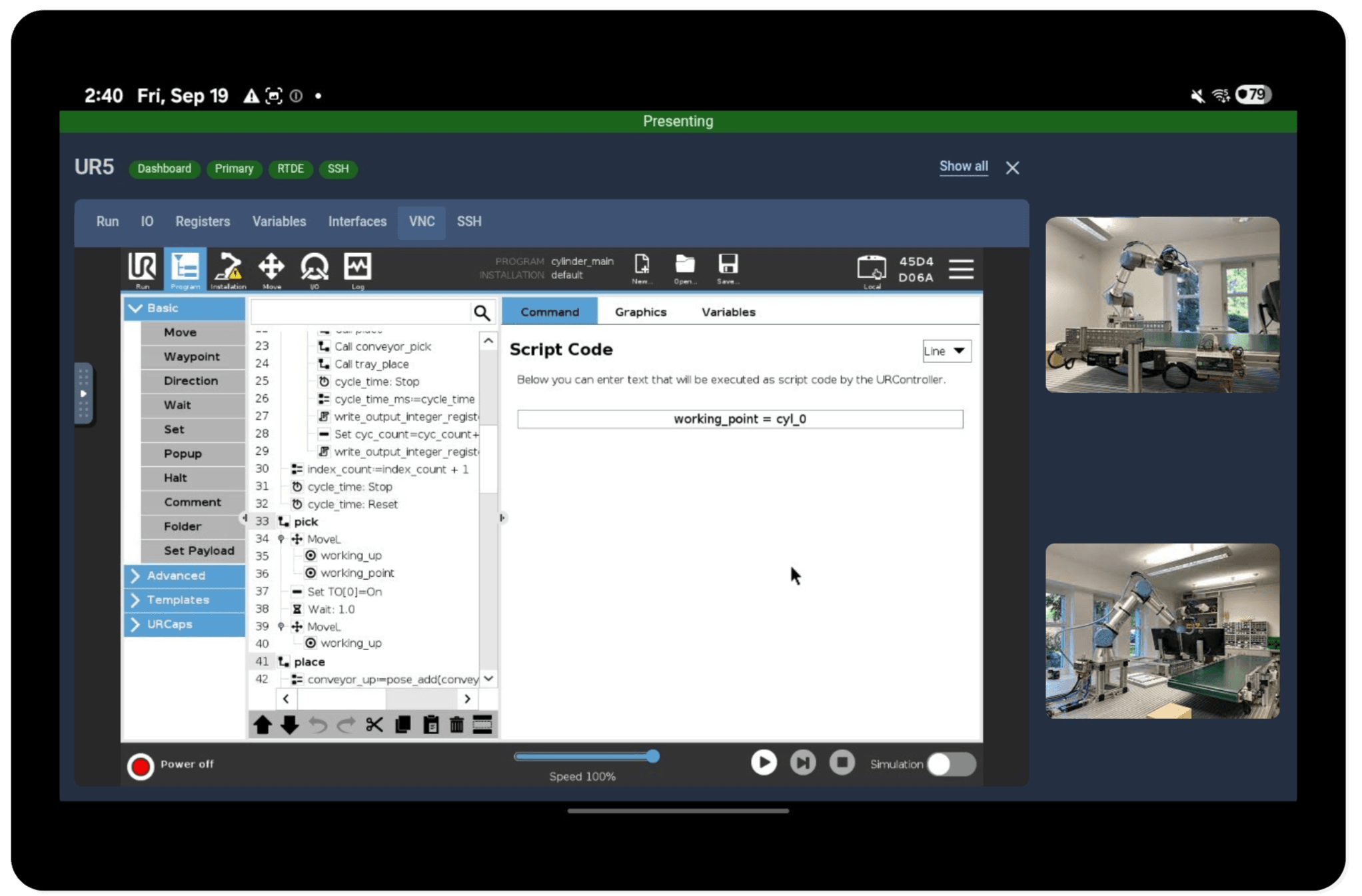
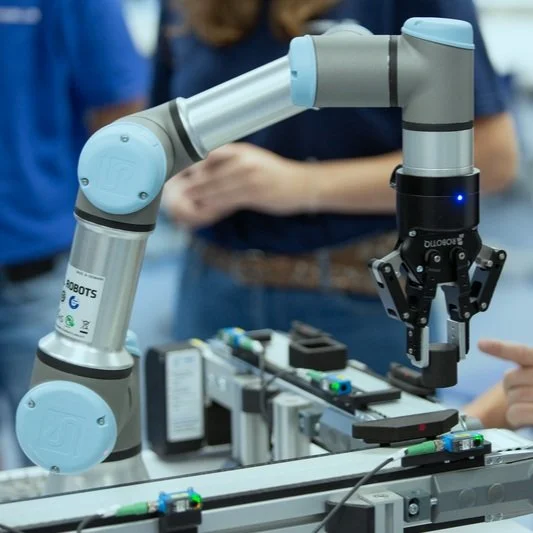
Operate the UR Teach Pendant Remotely – Control and interact with your Universal Robots controller directly through the Olis app interface
Secure Built-in SSH Access – Connect to your robot's controller over an integrated SSH terminal for streamlined diagnostics and advanced configuration
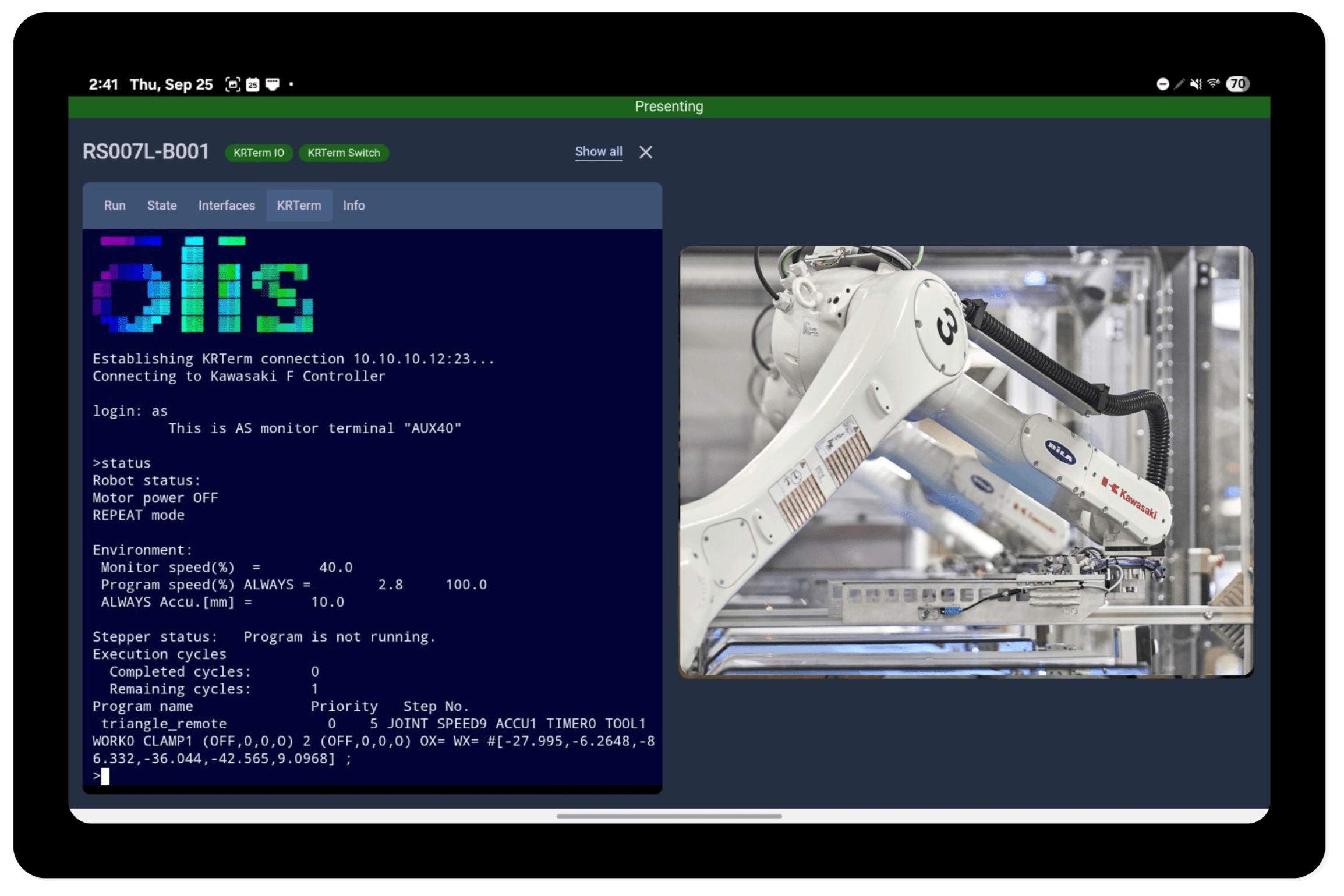
Integrated KRTerm Terminal – Perform hands-on technical tasks, including uploading and downloading backups, directly through the Olis app interface
Remote Studio 5000 Access – Connect to your PLC and edit code from anywhere to streamline programming and minimize downtime
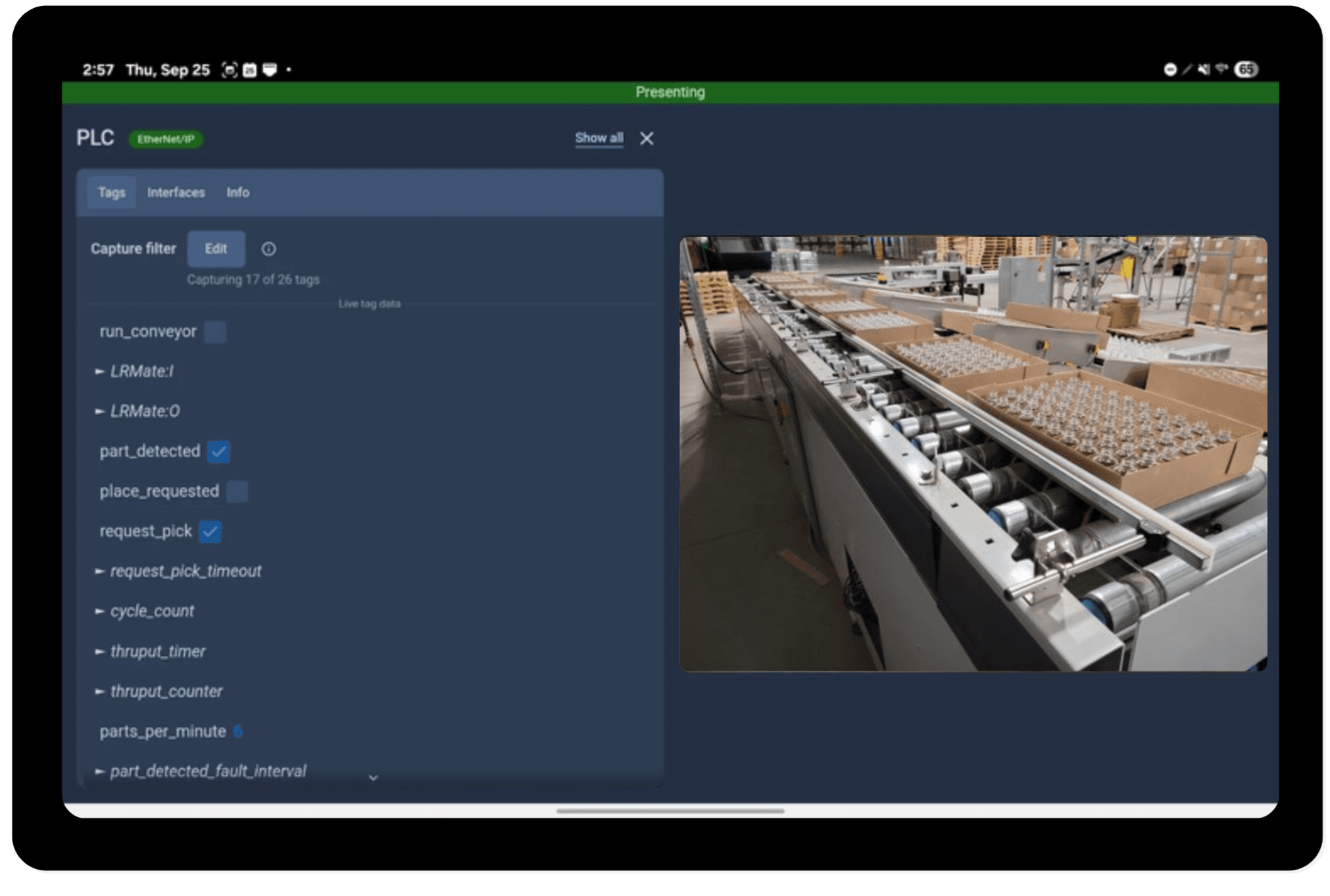
Filterable PLC Tag List – View and search PLC tags alongside their real-time values
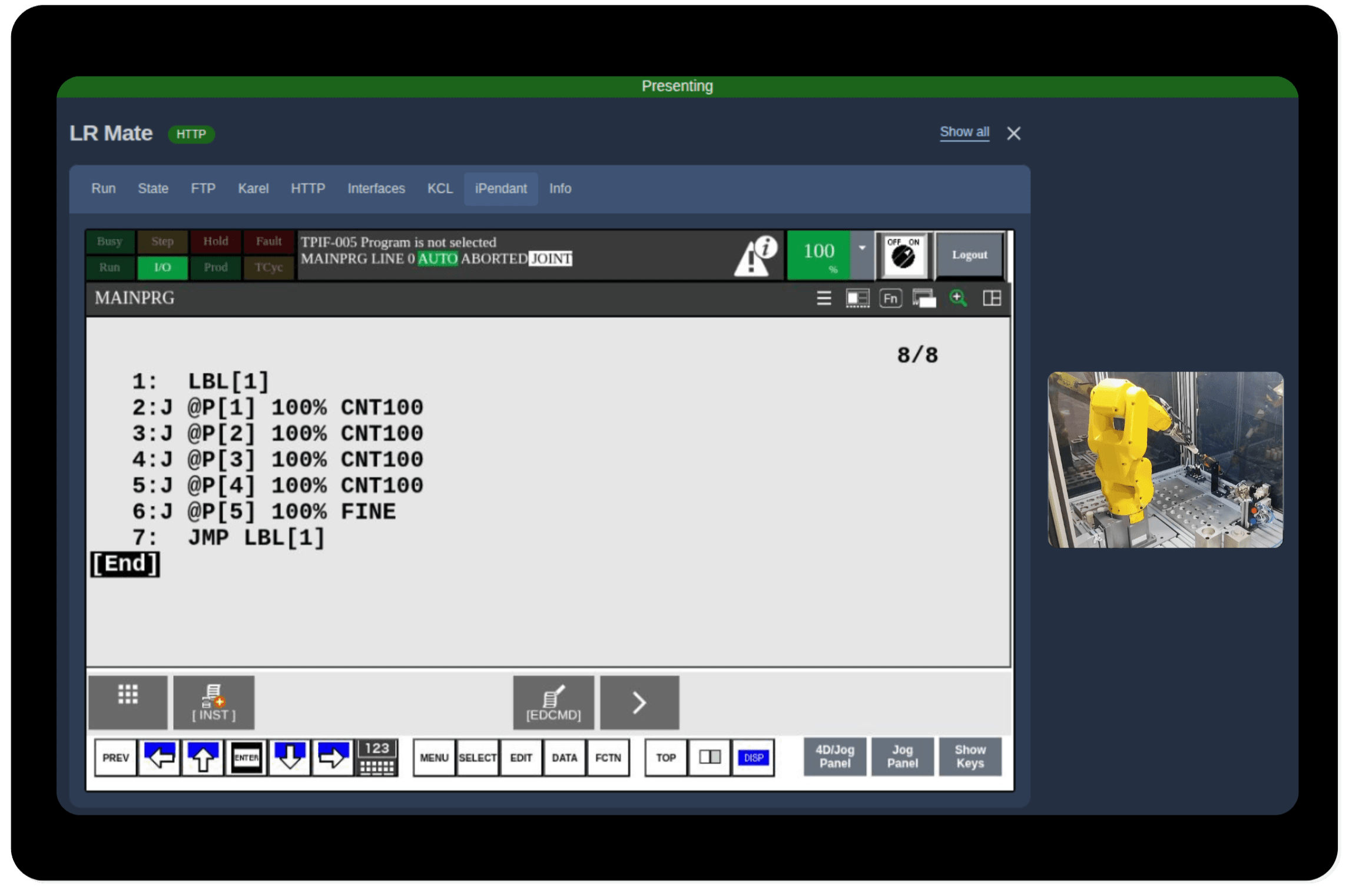
Operate the FANUC Remote iPendant – Control and interact with your FANUC robot controller directly through the Olis app interface
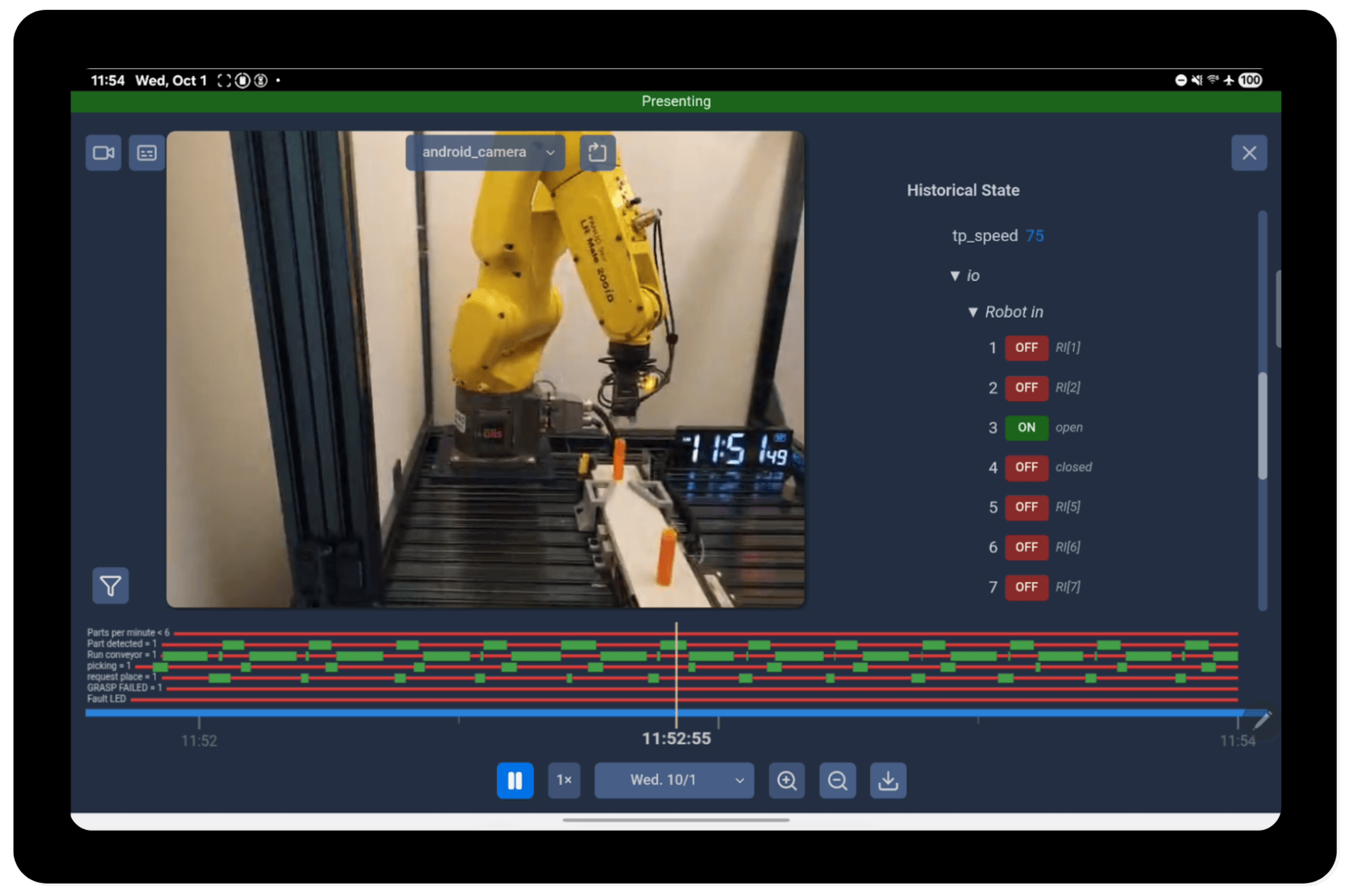
No more playing detective to pull together diagnostic data! Olis aligns weeks of video, event conditions, and historical state - all in one place
Features in action



"Technologies like Olis provide so much more information, so much more quickly, enabling us to solve problems faster than before."
Chief Controls Engineer at Pearson Packaging
The app runs best if you use the recommended tablet.
*Can be ordered from Amazon or picked up from your local Best Buy
Such that the tablet can communicate with the robot controllers/PLCs. We recommend this one since you can charge and use Ethernet simultaneously.
The app allows integrators and end users to remotely monitor and troubleshoot robots and PLCs, reducing travel time and enabling efficient debugging without a complex setup.
License key and download link sent instantly via email



